import jax
import jax.numpy as jnp
from memo import memo
from memo import domain as product
from enum import IntEnumFalse belief
forgery
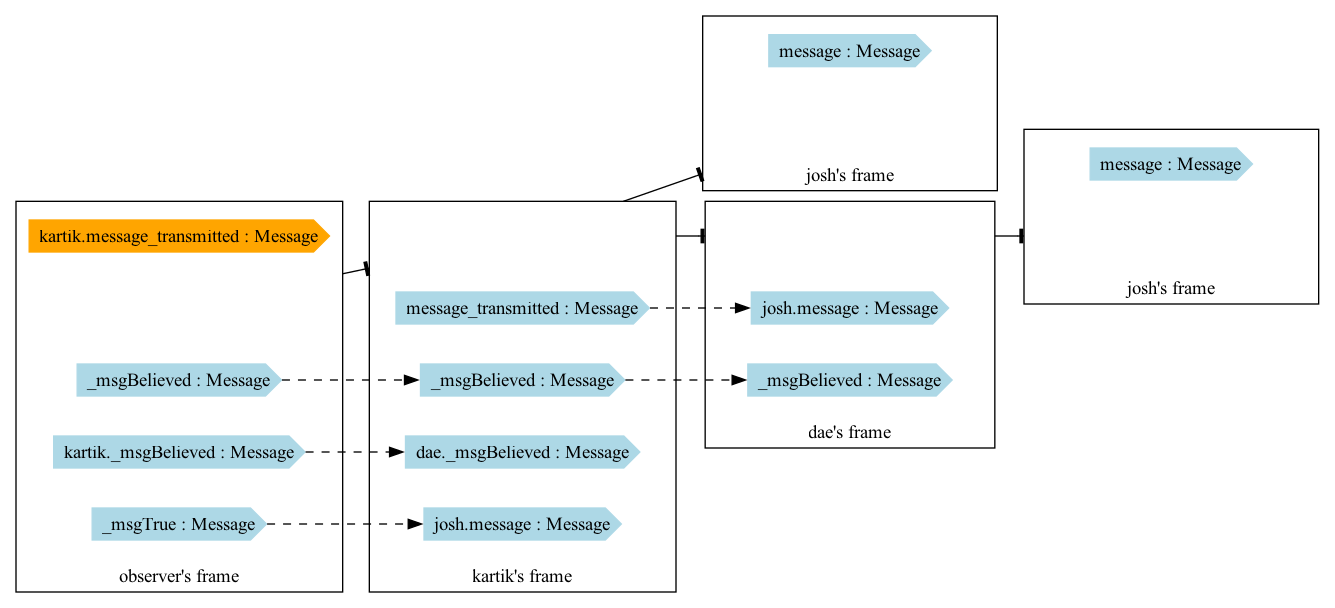
A simple illustration of the key idea.
class Deception(IntEnum):
NO = 0
YES = 1
class Action(IntEnum):
TRANSMIT = 0
FORGE = 1
class Message(IntEnum):
BAD = 0
GOOD = 1
@memo
def message_simple[_msgTrue: Message, _msgBelieved: Message](deception=0):
kartik: knows(_msgBelieved)
kartik: thinks[josh: chooses(message in Message, wpp=1)]
kartik: observes[josh.message] is _msgTrue ### kartik knows the true contents of josh's message
kartik: chooses(
message_transmitted in Message,
wpp=(
message_transmitted == josh.message
if deception == 0
else message_transmitted != josh.message
),
)
kartik: thinks[
dae: knows(_msgBelieved),
dae: thinks[josh: chooses(message in Message, wpp=1)],
### what kartik thinks dae's belief about the message is (false belief when `message_transmitted != josh.message`):
dae: observes [josh.message] is message_transmitted,
]
return E[kartik[dae[josh.message == _msgBelieved]]]Without deception, no false belief
_ = message_simple(0, print_table=True)+-------------------+-----------------------+-----------------+
| _msgTrue: Message | _msgBelieved: Message | message_simple |
+-------------------+-----------------------+-----------------+
| BAD | BAD | 1.0 |
| BAD | GOOD | 0.0 |
| GOOD | BAD | 0.0 |
| GOOD | GOOD | 1.0 |
+-------------------+-----------------------+-----------------+With deception and false belief
_ = message_simple(1, print_table=True)+-------------------+-----------------------+-----------------+
| _msgTrue: Message | _msgBelieved: Message | message_simple |
+-------------------+-----------------------+-----------------+
| BAD | BAD | 0.0 |
| BAD | GOOD | 1.0 |
| GOOD | BAD | 1.0 |
| GOOD | GOOD | 0.0 |
+-------------------+-----------------------+-----------------+
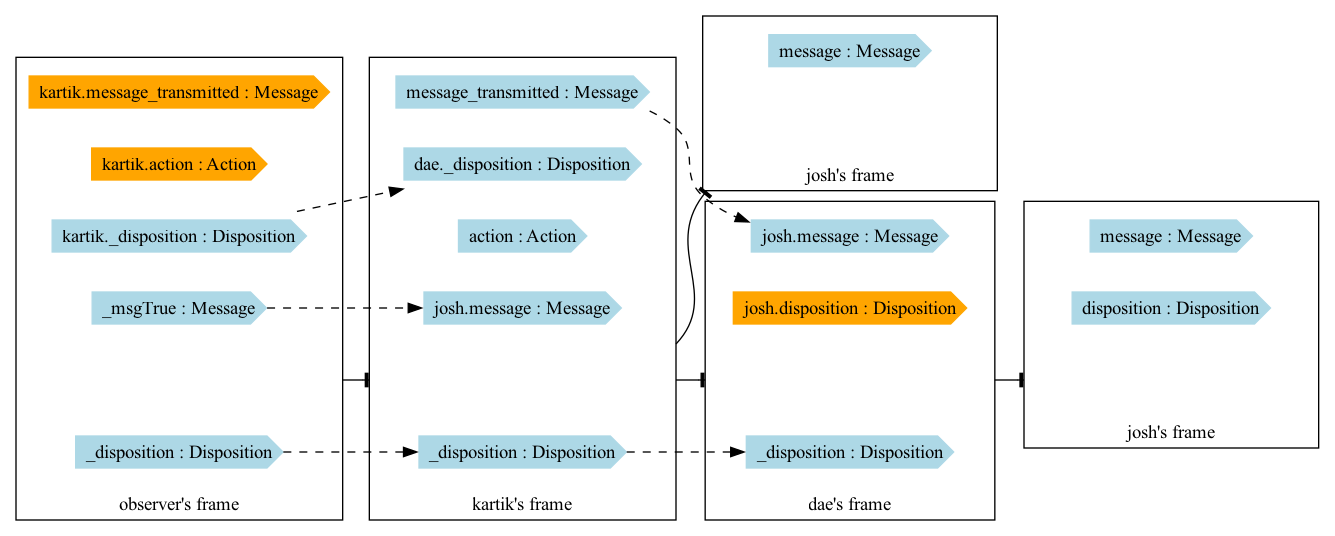
A more elaborated version of the same
class Action(IntEnum):
TRANSMIT = 0
FORGE = 1
class Message(IntEnum):
BAD = 0
GOOD = 1
class Disposition(IntEnum):
MEAN = 0
NICE = 1
@memo
def advisor_message[_msgTrue: Message, _disposition: Disposition]():
kartik: knows(_disposition)
kartik: thinks[
josh: chooses(message in Message, wpp=1)
]
kartik: observes[josh.message] is _msgTrue
kartik: chooses(action in Action, wpp=(
(
0.9 if action == {Action.FORGE} else 0.1
) if josh.message == {Message.GOOD}
else (
0.8 if action == {Action.TRANSMIT} else 0.2
)
))
kartik: chooses(
message_transmitted in Message,
wpp=(
message_transmitted == josh.message
if action == {Action.TRANSMIT}
else message_transmitted != josh.message
),
)
kartik: thinks[
dae: knows(_disposition),
dae: thinks[
josh: given(disposition in Disposition, wpp=(
0.9 if disposition == {Disposition.NICE} else 0.1
)),
josh: chooses(message in Message, wpp=(
(
0.8 if message == {Message.BAD} else 0.2
) if disposition == {Disposition.MEAN}
else (
0.3 if message == {Message.BAD} else 0.7
)
))
],
### what kartik thinks dae's belief about the message is (false belief when `action == {Action.FORGE}`):
dae: observes [josh.message] is message_transmitted,
]
return E[kartik[dae[E[josh.disposition == _disposition]]]]
_ = advisor_message(print_table=True)+-------------------+---------------------------+----------------------+
| _msgTrue: Message | _disposition: Disposition | advisor_message |
+-------------------+---------------------------+----------------------+
| BAD | MEAN | 0.18901099264621735 |
| BAD | NICE | 0.8109890222549438 |
| GOOD | MEAN | 0.20879121124744415 |
| GOOD | NICE | 0.7912086844444275 |
+-------------------+---------------------------+----------------------+Try commenting out the line dae: observes [josh.message] is message_transmitted,. How do the probabilities change? Without the observes statement, Kartik thinks that Dae thinks that that Josh’s disposition is the prior (0.9 NICE, 0.1 MEAN). What about if you replace it with dae: observes [josh.message] is _msgTrue, (you’ll need to add kartik: knows(_msgTrue))?
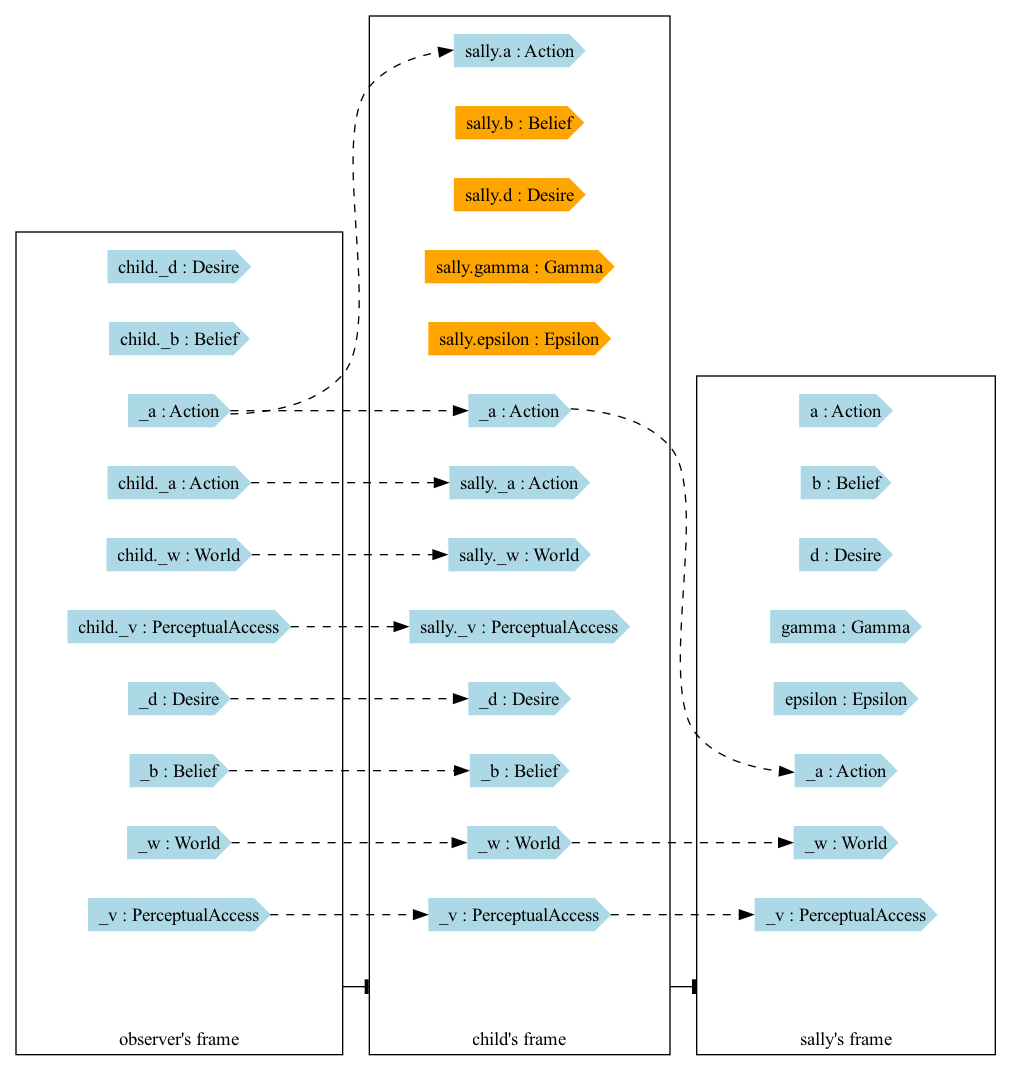
goodman array
This implementation sticks close to the structure of Goodman et al. (2006).
We assume asymmetric-beta priors on \epsilon and \gamma. In the example simulations described below (Figures 2 and 3) the hyper-parameters were set to { \beta(1, 10) } for \epsilon, indicating that Sally probably wants her toy, and { \beta(1, 5) } for \gamma, indicating that she is unlikely to change her belief (lacking access).
Our PT model becomes deterministic if we introduce an External Information (or ‘alternate access’) variable, { \operatorname{E}_\gamma } (with prior probability \gamma), to explicitly represent events which cause changes in belief (in the absence of access).
The variable Desire has prior probability 1 - \epsilon, which will be large for desirable objects (such as a toy).
import jax
import jax.numpy as jnp
from memo import memo
from enum import IntEnum
from matplotlib import pyplot as plt
from jax.scipy.stats.beta import pdf as betapdf
BetaPrior = jax.jit(betapdf)
class World(IntEnum):
ORIGINAL = 0
NEW = 1
class PerceptualAccess(IntEnum):
NO = 0
YES = 1
class Action(IntEnum):
ORIGINAL = 0
NEW = 1
class Belief(IntEnum):
ORIGINAL = 0
NEW = 1
class Desire(IntEnum):
OTHER = 0
TOY = 1
@jax.jit
def action_pmf(a, b, d):
return jnp.array([
[
[0.5, 0.5], ### b=0, d=0
[0.5, 0.5], ### b=1, d=0
],
[
[1, 0], ### b=0, d=1
[0, 1], ### b=1, d=1
],
])[d, b, a]
@jax.jit
def belief_pt_pmf(b, w, v, gamma):
return jnp.array([
[
[1-gamma, gamma], ### w=0, v=0
[1-gamma, gamma], ### w=1, v=0
],
[
[1, 0], ### w=0, v=1
[0, 1], ### w=1, v=1
],
])[v, w, b]
Epsilon = jnp.linspace(0, 1, 20)
Gamma = jnp.linspace(0, 1, 20)
@memo
def goodman_array[_w: World, _v: PerceptualAccess, _a: Action, _b: Belief, _d: Desire]():
child: knows(_v, _w, _a, _b, _d)
child: thinks[
sally: knows(_v, _w, _a),
sally: given(epsilon in Epsilon, wpp=BetaPrior(epsilon, 1, 10)),
sally: given(gamma in Gamma, wpp=BetaPrior(gamma, 1, 5)),
sally: chooses(d in Desire, wpp=1 - epsilon if d == 1 else epsilon),
sally: chooses(b in Belief, wpp=belief_pt_pmf(b, _w, _v, gamma)), ### what child thinks that sally's belief is (false belief when `b != _w`)
sally: chooses(a in Action, wpp=action_pmf(a, b, d)),
]
child: observes [ sally.a ] is _a ### child observes sally look in a location
return child[ Pr[sally.b == _b, sally.d == _d] ]
res = f(print_table=True, return_pandas=True, return_aux=True, return_xarray=True)+----------------------+-----------------------+
| _p: P | f |
+----------------------+-----------------------+
| 0.0 | 0.009999999776482582 |
| 0.010101010091602802 | 0.009999999776482582 |
| 0.020202020183205605 | 0.009999999776482582 |
| 0.03030303120613098 | 0.009999999776482582 |
| 0.04040404036641121 | 0.009999999776482582 |
| 0.05050504952669144 | 0.009999999776482582 |
| 0.06060606241226196 | 0.009999999776482582 |
| 0.07070706784725189 | 0.009999999776482582 |
| 0.08080808073282242 | 0.009999999776482582 |
| 0.09090909361839294 | 0.009999999776482582 |
| 0.10101009905338287 | 0.009999999776482582 |
| 0.1111111119389534 | 0.009999999776482582 |
| 0.12121212482452393 | 0.009999999776482582 |
| 0.13131313025951385 | 0.009999999776482582 |
| 0.14141413569450378 | 0.009999999776482582 |
| 0.1515151560306549 | 0.009999999776482582 |
| 0.16161616146564484 | 0.009999999776482582 |
| 0.17171716690063477 | 0.009999999776482582 |
| 0.1818181872367859 | 0.009999999776482582 |
| 0.19191919267177582 | 0.009999999776482582 |
| 0.20202019810676575 | 0.009999999776482582 |
| 0.21212121844291687 | 0.009999999776482582 |
| 0.2222222238779068 | 0.009999999776482582 |
| 0.23232322931289673 | 0.009999999776482582 |
| 0.24242424964904785 | 0.009999999776482582 |
| 0.2525252401828766 | 0.009999999776482582 |
| 0.2626262605190277 | 0.009999999776482582 |
| 0.27272728085517883 | 0.009999999776482582 |
| 0.28282827138900757 | 0.009999999776482582 |
| 0.2929292917251587 | 0.009999999776482582 |
| 0.3030303120613098 | 0.009999999776482582 |
| 0.31313130259513855 | 0.009999999776482582 |
| 0.3232323229312897 | 0.009999999776482582 |
| 0.3333333432674408 | 0.009999999776482582 |
| 0.34343433380126953 | 0.009999999776482582 |
| 0.35353535413742065 | 0.009999999776482582 |
| 0.3636363744735718 | 0.009999999776482582 |
| 0.3737373650074005 | 0.009999999776482582 |
| 0.38383838534355164 | 0.009999999776482582 |
| 0.39393940567970276 | 0.009999999776482582 |
| 0.4040403962135315 | 0.009999999776482582 |
| 0.4141414165496826 | 0.009999999776482582 |
| 0.42424243688583374 | 0.009999999776482582 |
| 0.4343434274196625 | 0.009999999776482582 |
| 0.4444444477558136 | 0.009999999776482582 |
| 0.4545454680919647 | 0.009999999776482582 |
| 0.46464645862579346 | 0.009999999776482582 |
| 0.4747474789619446 | 0.009999999776482582 |
| 0.4848484992980957 | 0.009999999776482582 |
| 0.49494948983192444 | 0.009999999776482582 |
| 0.5050504803657532 | 0.009999999776482582 |
| 0.5151515007019043 | 0.009999999776482582 |
| 0.5252525210380554 | 0.009999999776482582 |
| 0.5353535413742065 | 0.009999999776482582 |
| 0.5454545617103577 | 0.009999999776482582 |
| 0.5555555820465088 | 0.009999999776482582 |
| 0.5656565427780151 | 0.009999999776482582 |
| 0.5757575631141663 | 0.009999999776482582 |
| 0.5858585834503174 | 0.009999999776482582 |
| 0.5959596037864685 | 0.009999999776482582 |
| 0.6060606241226196 | 0.009999999776482582 |
| 0.6161616444587708 | 0.009999999776482582 |
| 0.6262626051902771 | 0.009999999776482582 |
| 0.6363636255264282 | 0.009999999776482582 |
| 0.6464646458625793 | 0.009999999776482582 |
| 0.6565656661987305 | 0.009999999776482582 |
| 0.6666666865348816 | 0.009999999776482582 |
| 0.6767676472663879 | 0.009999999776482582 |
| 0.6868686676025391 | 0.009999999776482582 |
| 0.6969696879386902 | 0.009999999776482582 |
| 0.7070707082748413 | 0.009999999776482582 |
| 0.7171717286109924 | 0.009999999776482582 |
| 0.7272727489471436 | 0.009999999776482582 |
| 0.7373737096786499 | 0.009999999776482582 |
| 0.747474730014801 | 0.009999999776482582 |
| 0.7575757503509521 | 0.009999999776482582 |
| 0.7676767706871033 | 0.009999999776482582 |
| 0.7777777910232544 | 0.009999999776482582 |
| 0.7878788113594055 | 0.009999999776482582 |
| 0.7979797720909119 | 0.009999999776482582 |
| 0.808080792427063 | 0.009999999776482582 |
| 0.8181818127632141 | 0.009999999776482582 |
| 0.8282828330993652 | 0.009999999776482582 |
| 0.8383838534355164 | 0.009999999776482582 |
| 0.8484848737716675 | 0.009999999776482582 |
| 0.8585858345031738 | 0.009999999776482582 |
| 0.868686854839325 | 0.009999999776482582 |
| 0.8787878751754761 | 0.009999999776482582 |
| 0.8888888955116272 | 0.009999999776482582 |
| 0.8989899158477783 | 0.009999999776482582 |
| 0.9090909361839294 | 0.009999999776482582 |
| 0.9191918969154358 | 0.009999999776482582 |
| 0.9292929172515869 | 0.009999999776482582 |
| 0.939393937587738 | 0.009999999776482582 |
| 0.9494949579238892 | 0.009999999776482582 |
| 0.9595959782600403 | 0.009999999776482582 |
| 0.9696969985961914 | 0.009999999776482582 |
| 0.9797979593276978 | 0.009999999776482582 |
| 0.9898989796638489 | 0.009999999776482582 |
| 1.0 | 0.009999999776482582 |
+----------------------+-----------------------+
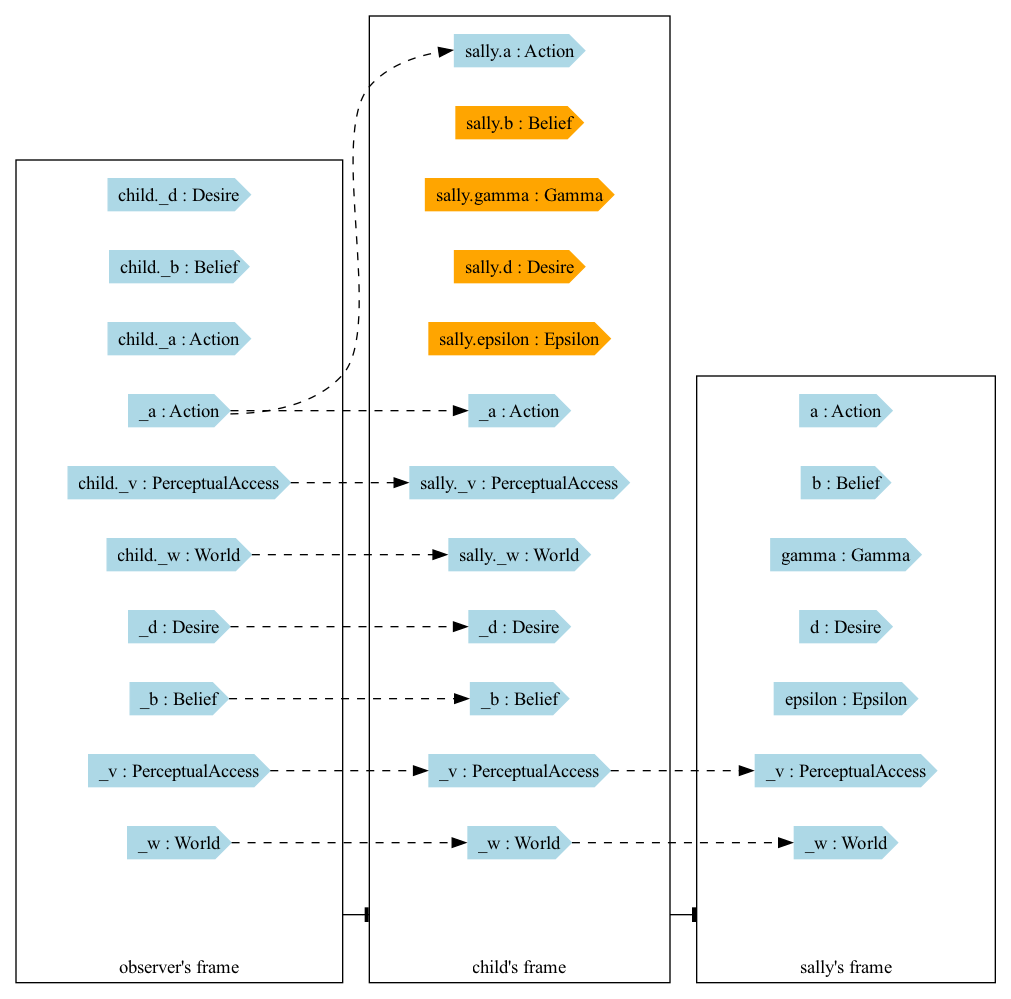
goodman conditionals
This implementation replaces the array above with conditionals. Still the same model as Goodman et al. (2006).
import jax
import jax.numpy as jnp
from memo import memo
from enum import IntEnum
from matplotlib import pyplot as plt
from jax.scipy.stats.beta import pdf as betapdf
BetaPrior = jax.jit(betapdf)
class World(IntEnum):
ORIGINAL = 0
NEW = 1
class PerceptualAccess(IntEnum):
NO = 0
YES = 1
class Action(IntEnum):
ORIGINAL = 0
NEW = 1
class Belief(IntEnum):
ORIGINAL = 0
NEW = 1
class Desire(IntEnum):
OTHER = 0
TOY = 1
Epsilon = jnp.linspace(0, 1, 20)
Gamma = jnp.linspace(0, 1, 20)
@memo
def goodman_conditionals[_w: World, _v: PerceptualAccess, _a: Action, _b: Belief, _d: Desire]():
child: knows(_w, _v, _a, _b, _d)
child: thinks[
sally: knows(_w, _v),
### epsilon - tends to be < 0.5, indicating that Sally probably wants her toy, but can want something other than her toy with probability epsilon
sally: given(epsilon in Epsilon, wpp=BetaPrior(epsilon, 1, 10)), ### epsilon ~ Beta(1, 10)
sally: chooses(d in Desire, wpp=(
1 - epsilon if d == {Desire.TOY} ### P(Desire=TOY) = 1 - epsilon
else epsilon ### P(Desire=OTHER) = epsilon
)),
### gamma - tends to be < 0.5, indicating that she is unlikely to change her belief (lacking perceptual access)
sally: given(gamma in Gamma, wpp=BetaPrior(gamma, 1, 5)), ### epsilon ~ Beta(1, 5)
### what child thinks that sally's belief is (false belief when `b != _w`) ###
sally: chooses(b in Belief, wpp=(
### if she has perceptual access, her belief about the world is the same as the child's knowledge
_w == b if _v == {PerceptualAccess.YES}
else (
### if she doesn't have perceptual access, Sally can spontaneously change her belief about the location of the toy with probability gamma, but gamma is small, so her original belief (b == 0) tends to persist
1 - gamma if b == {Belief.ORIGINAL} ### P(Belief=ORIGINAL) = 1 - gamma
else gamma ### P(Belief=NEW) = gamma
)
)),
### if Sally wants the toy, she deterministically choose the action that matches her belief.
### if she doesn't want the toy, choose with no preference
sally: chooses(a in Action, wpp=a == b if d == {Desire.TOY} else 0.5),
]
child: observes [ sally.a ] is _a
return child[ Pr[sally.b == _b, sally.d == _d] ]
res = goodman_conditionals(print_table=True, return_aux=True, return_pandas=True, return_xarray=True)+-----------+----------------------+------------+------------+------------+-----------------------+
| _w: World | _v: PerceptualAccess | _a: Action | _b: Belief | _d: Desire | goodman_conditionals |
+-----------+----------------------+------------+------------+------------+-----------------------+
| ORIGINAL | NO | ORIGINAL | ORIGINAL | OTHER | 0.035531193017959595 |
| ORIGINAL | NO | ORIGINAL | ORIGINAL | TOY | 0.9584097266197205 |
| ORIGINAL | NO | ORIGINAL | NEW | OTHER | 0.006058556027710438 |
| ORIGINAL | NO | ORIGINAL | NEW | TOY | 0.0 |
| ORIGINAL | NO | NEW | ORIGINAL | OTHER | 0.17331275343894958 |
| ORIGINAL | NO | NEW | ORIGINAL | TOY | 0.0 |
| ORIGINAL | NO | NEW | NEW | OTHER | 0.029552219435572624 |
| ORIGINAL | NO | NEW | NEW | TOY | 0.7971351742744446 |
| ORIGINAL | YES | ORIGINAL | ORIGINAL | OTHER | 0.03574778139591217 |
| ORIGINAL | YES | ORIGINAL | ORIGINAL | TOY | 0.9642521739006042 |
| ORIGINAL | YES | ORIGINAL | NEW | OTHER | 0.0 |
| ORIGINAL | YES | ORIGINAL | NEW | TOY | 0.0 |
| ORIGINAL | YES | NEW | ORIGINAL | OTHER | 1.0 |
| ORIGINAL | YES | NEW | ORIGINAL | TOY | 0.0 |
| ORIGINAL | YES | NEW | NEW | OTHER | 0.0 |
| ORIGINAL | YES | NEW | NEW | TOY | 0.0 |
| NEW | NO | ORIGINAL | ORIGINAL | OTHER | 0.035531193017959595 |
| NEW | NO | ORIGINAL | ORIGINAL | TOY | 0.9584097266197205 |
| NEW | NO | ORIGINAL | NEW | OTHER | 0.006058556027710438 |
| NEW | NO | ORIGINAL | NEW | TOY | 0.0 |
| NEW | NO | NEW | ORIGINAL | OTHER | 0.17331275343894958 |
| NEW | NO | NEW | ORIGINAL | TOY | 0.0 |
| NEW | NO | NEW | NEW | OTHER | 0.029552219435572624 |
| NEW | NO | NEW | NEW | TOY | 0.7971351742744446 |
| NEW | YES | ORIGINAL | ORIGINAL | OTHER | 0.0 |
| NEW | YES | ORIGINAL | ORIGINAL | TOY | 0.0 |
| NEW | YES | ORIGINAL | NEW | OTHER | 1.0 |
| NEW | YES | ORIGINAL | NEW | TOY | 0.0 |
| NEW | YES | NEW | ORIGINAL | OTHER | 0.0 |
| NEW | YES | NEW | ORIGINAL | TOY | 0.0 |
| NEW | YES | NEW | NEW | OTHER | 0.03574778139591217 |
| NEW | YES | NEW | NEW | TOY | 0.9642521739006042 |
+-----------+----------------------+------------+------------+------------+-----------------------+
marble
from memo import memo
import jax.numpy as np
import jax
from enum import IntEnum
class Loc(IntEnum):
BOX = 0
BASKET = 1
class Action(IntEnum):
ACT_STAY = 0
ACT_MOVE = 1
@jax.jit
def do(l, a):
return np.array([
[0, 1],
[1, 0]
])[a, l]
class Obs(IntEnum):
OBS_NONE = -1
OBS_STAY = 0
OBS_MOVE = 1
@memo
def marble[marble_pos_t0: Loc, obs: Obs, where_look: Loc]():
child: knows(marble_pos_t0, obs, where_look)
child: thinks[
sally: knows(marble_pos_t0, where_look),
sally: thinks[
anne: knows(marble_pos_t0),
anne: chooses(a in Action, wpp=0.01 if a=={Action.ACT_MOVE} else 0.99),
anne: chooses(marble_pos_t1 in Loc, wpp=do(marble_pos_t0, a)==marble_pos_t1),
anne: chooses(o in Obs, wpp=1 if o=={Obs.OBS_NONE} or o==a else 0),
],
sally: observes [anne.o] is obs
]
return child[ sally[Pr[ anne.marble_pos_t1 == where_look ]] ]
marble()Array([[[0.99, 0.01],
[1. , 0. ],
[0. , 1. ]],
[[0.01, 0.99],
[0. , 1. ],
[1. , 0. ]]], dtype=float32)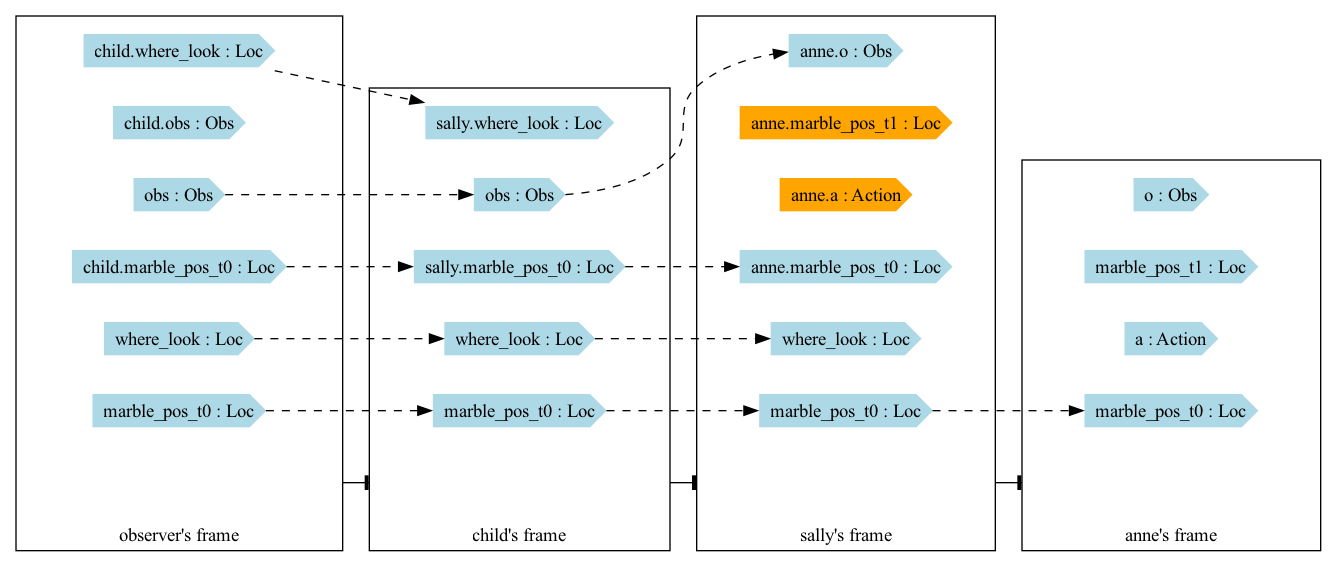
NoteRender env
%reset -f
import sys
import platform
import importlib.metadata
print("Python:", sys.version)
print("Platform:", platform.system(), platform.release())
print("Processor:", platform.processor())
print("Machine:", platform.machine())
print("\nPackages:")
for name, version in sorted(
((dist.metadata["Name"], dist.version) for dist in importlib.metadata.distributions()),
key=lambda x: x[0].lower() # Sort case-insensitively
):
print(f"{name}=={version}")Python: 3.14.3 (main, Feb 4 2026, 01:51:49) [Clang 21.1.4 ]
Platform: Darwin 24.6.0
Processor: arm
Machine: arm64
Packages:
altair==6.0.0
annotated-types==0.7.0
anyio==4.12.1
anywidget==0.9.21
appnope==0.1.4
argon2-cffi==25.1.0
argon2-cffi-bindings==25.1.0
arrow==1.4.0
astroid==4.0.4
asttokens==3.0.1
async-lru==2.1.0
attrs==25.4.0
babel==2.18.0
beautifulsoup4==4.14.3
bleach==6.3.0
certifi==2026.1.4
cffi==2.0.0
cfgv==3.5.0
charset-normalizer==3.4.4
click==8.3.1
colour-science==0.4.7
comm==0.2.3
contourpy==1.3.3
cycler==0.12.1
debugpy==1.8.20
decorator==5.2.1
defusedxml==0.7.1
dill==0.4.1
distlib==0.4.0
distro==1.9.0
docutils==0.22.4
executing==2.2.1
fastjsonschema==2.21.2
filelock==3.20.3
fonttools==4.61.1
fqdn==1.5.1
h11==0.16.0
httpcore==1.0.9
httpx==0.28.1
identify==2.6.16
idna==3.11
importlib_metadata==8.7.1
ipykernel==7.2.0
ipython==9.10.0
ipython_pygments_lexers==1.1.1
ipywidgets==8.1.8
isoduration==20.11.0
isort==7.0.0
itsdangerous==2.2.0
jax==0.9.0.1
jaxlib==0.9.0.1
jedi==0.19.2
Jinja2==3.1.6
jiter==0.13.0
joblib==1.5.3
json5==0.13.0
jsonpointer==3.0.0
jsonschema==4.26.0
jsonschema-specifications==2025.9.1
jupyter-cache==1.0.1
jupyter-events==0.12.0
jupyter-lsp==2.3.0
jupyter_client==8.8.0
jupyter_core==5.9.1
jupyter_server==2.17.0
jupyter_server_terminals==0.5.4
jupyterlab==4.5.3
jupyterlab_pygments==0.3.0
jupyterlab_server==2.28.0
jupyterlab_widgets==3.0.16
kiwisolver==1.4.9
lark==1.3.1
marimo==0.19.9
Markdown==3.10.1
MarkupSafe==3.0.3
matplotlib==3.10.8
matplotlib-inline==0.2.1
mccabe==0.7.0
memo-lang==1.2.9
mistune==3.2.0
ml_dtypes==0.5.4
msgspec==0.20.0
narwhals==2.16.0
nbclient==0.10.4
nbconvert==7.17.0
nbformat==5.10.4
nest-asyncio==1.6.0
networkx==3.6.1
nodeenv==1.10.0
notebook_shim==0.2.4
numpy==2.4.2
numpy-typing-compat==20251206.2.4
openai==2.17.0
opt_einsum==3.4.0
optype==0.15.0
packaging==26.0
pandas==3.0.0
pandas-stubs==3.0.0.260204
pandocfilters==1.5.1
parso==0.8.5
pexpect==4.9.0
pillow==12.1.0
platformdirs==4.5.1
plotly==5.24.1
pre_commit==4.5.1
prometheus_client==0.24.1
prompt_toolkit==3.0.52
psutil==7.2.2
psygnal==0.15.1
ptyprocess==0.7.0
pure_eval==0.2.3
pycparser==3.0
pydantic==2.12.5
pydantic_core==2.41.5
Pygments==2.19.2
pygraphviz==1.14
pylint==4.0.4
pymdown-extensions==10.20.1
pyparsing==3.3.2
python-dateutil==2.9.0.post0
python-dotenv==1.2.1
python-json-logger==4.0.0
PyYAML==6.0.3
pyzmq==27.1.0
referencing==0.37.0
requests==2.32.5
rfc3339-validator==0.1.4
rfc3986-validator==0.1.1
rfc3987-syntax==1.1.0
rpds-py==0.30.0
ruff==0.15.0
scikit-learn==1.8.0
scipy==1.17.0
scipy-stubs==1.17.0.2
seaborn==0.13.2
Send2Trash==2.1.0
setuptools==81.0.0
six==1.17.0
sniffio==1.3.1
soupsieve==2.8.3
SQLAlchemy==2.0.46
stack-data==0.6.3
starlette==0.52.1
tabulate==0.9.0
tenacity==9.1.4
terminado==0.18.1
threadpoolctl==3.6.0
tinycss2==1.4.0
toml==0.10.2
tomlkit==0.14.0
tornado==6.5.4
tqdm==4.67.3
traitlets==5.14.3
typing-inspection==0.4.2
typing_extensions==4.15.0
tzdata==2025.3
uri-template==1.3.0
urllib3==2.6.3
uvicorn==0.40.0
virtualenv==20.36.1
wcwidth==0.6.0
webcolors==25.10.0
webencodings==0.5.1
websocket-client==1.9.0
websockets==16.0
widgetsnbextension==4.0.15
xarray==2026.1.0
zipp==3.23.0References
Goodman, Noah D., Baker, Chris L., Bonawitz, Elizabeth Baraff, Mansinghka, Vikash K., Gopnik, Alison, Wellman, Henry, Schulz, Laura, & Tenenbaum, Joshua B. (2006). Intuitive theories of mind: A rational approach to false belief. Proceedings of the Annual Meeting of the Cognitive Science Society, 28.