import jax
import jax.numpy as jnp
from memo import memo
from jax.scipy.stats.norm import pdf as normpdf
from jax.scipy.stats.norm import logpdf as normlogpdf
Data = jnp.array([-5, 5, 10])
Mu = jnp.linspace(-50, 50, 1000)
@jax.jit
def prior(mu):
component1 = normpdf(mu, loc=-10, scale=5)
component2 = normpdf(mu, loc=10, scale=5)
return jnp.mean(jnp.array([component1, component2]))
@jax.jit
def likelihood(mu, sigma=5):
return jnp.exp(jnp.sum(normlogpdf(Data, loc=mu, scale=sigma)))
@memo
def model_bimodal_prior[
_mu: Mu,
](sigma=1):
observer: knows(_mu)
observer: thinks[
### consider a hypothesis ###
process: given(mu in Mu, wpp=prior(mu)), ### given the hypothesis, mu
]
### score the observed data under the likelihood model ###
observer: observes_event(wpp=likelihood(process.mu, sigma))
### return the posterior probability of mu ###
return observer[Pr[process.mu == _mu]]Bayesian Inference: Parametric and Non-Parametric Posterior Distributions
TipJupyter Notebook
NB the Jupyter notebook includes interactive widgets that are very useful for building an understanding of these models.
Problem
Consider a simple likelihood model: data are normally distributed with mean \mu and standard deviation \sigma.
We draw three observations (d \in \mathcal{D}) from this data-generating process:
\mathcal{D} = \{ -5, 5, 10\}
Given these data, we wish to infer \mu, assuming a fixed standard deviation \sigma (e.g. \sigma = 5).
From Bayes’ rule, we know:
\begin{align*} P(\mu \mid \mathcal{D}) = \frac{P(\mu) ~ P(\mathcal{D} \mid \mu)}{P(\mathcal{D})} = \frac{P(\mu) ~ P(\mathcal{D} \mid \mu)}{\int_{\mu} P(\mu) ~ P(\mathcal{D} \mid \mu) ~\mathrm{d}\mu} \end{align*}
Where:
- P(\mu) is the prior belief about \mu before observing any data
- P(\mathcal{D} \mid \mu) is the likelihood of observing the data under a given hypothesis
- P(\mathcal{D}) is the marginal likelihood of the data
Model with bimodal prior
Imagine that we have a prior belief that the data generating process could have a mean near 10, or a mean near -10. We can instantiate this bimodal belief as a Gaussian mixture with equal weights on two components:
Thus, the model is defined as:
\begin{align*} \mu &\sim 0.5 \cdot \mathcal{N}(-10, 5) + 0.5 \cdot \mathcal{N}(10, 5) \\ \sigma &= 5 \quad \text{(fixed)} \\ d &\sim \mathcal{N}(\mu, \sigma) \end{align*}
Prior
P(\mu) = 0.5 \cdot \mathcal{N}(\mu \mid -10, 5) + 0.5 \cdot \mathcal{N}(\mu \mid 10, 5)
Likelihood
P(\mathcal{D} \mid \mu) = \prod_{d \in \mathcal{D}} \mathcal{N}(d \mid \mu, \sigma)
Posterior
P(\mu \mid \mathcal{D}) = \frac{P(\mu) \cdot P(\mathcal{D} \mid \mu)}{\int P(\mu) \cdot P(\mathcal{D} \mid \mu) \,\mathrm{d}\mu}
Implementation
We can implement this model in memo like so:
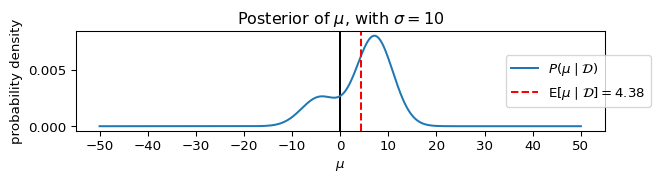
Interactive Visualization
Let’s plot the posterior, P(\mu \mid \mathcal{D}), assuming different values for \sigma.
Plotting function
from matplotlib import pyplot as plt
def plot_model(sigma=1, figsize=(5, 4), verbose=False):
posterior = model_bimodal_prior(sigma=sigma)
fig, ax = plt.subplots(figsize=figsize)
ax.axvline(0, color="black", linestyle="-")
ax.plot(Mu, posterior, label=r"$P(\mu \mid \mathcal{D})$")
mu_expectation = jnp.dot(Mu, posterior)
ax.axvline(
mu_expectation,
color='red',
linestyle='--',
label=r"$\operatorname{E}" + r"[\mu \mid \mathcal{D}]=" + f"{mu_expectation:6.2f}$")
_ = ax.set_xticks(jnp.arange(-50, 50 + 10, 10))
_ = ax.set_title(rf"Posterior of $\mu$, with $\sigma={sigma}$")
_ = ax.legend(bbox_to_anchor=(0.8, 0.5), loc='center left')
_ = ax.set_xlabel(r"$\mu$")
_ = ax.set_ylabel("probability density")
plt.tight_layout()
plt.show()Parameters to plot
param_list = [
dict(sigma=1),
dict(sigma=5),
dict(sigma=10),
dict(sigma=20),
]
for i_params_, params_ in enumerate(param_list):
plot_model(**params_, figsize=(7, 2))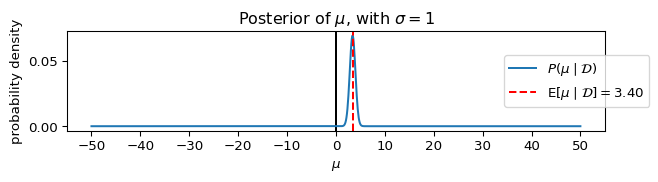


Exercise
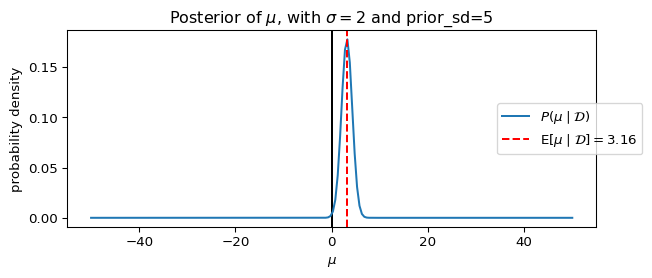
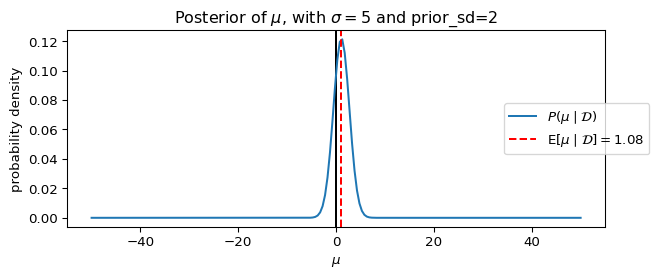
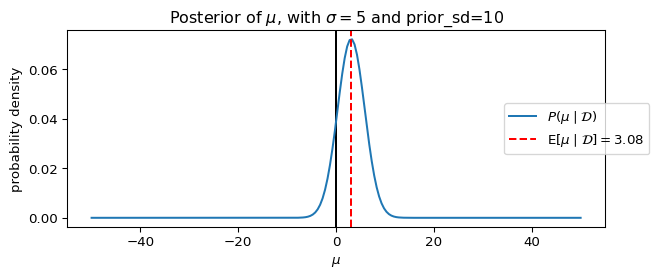
Replace the bimodal prior with a Gaussian prior. First implement a Gaussian prior with mean 0 and standard deviation 5. Then try different standard deviations. Describe how the Gaussian prior affects the inferred posterior.
Solution
Model with Gaussian prior
The model is defined as:
\begin{align*} \mu &\sim \mathcal{N}(0, 5) \\ \sigma &= 5 \quad \text{(fixed)} \\ d &\sim \mathcal{N}(\mu, \sigma) \end{align*}
Prior
P(\mu) = \mathcal{N}(\mu \mid 0, 5)
Likelihood
P(\mathcal{D} \mid \mu) = \prod_{d \in \mathcal{D}} \mathcal{N}(d \mid \mu, \sigma)
Posterior
P(\mu \mid \mathcal{D}) = \frac{P(\mu) \cdot P(\mathcal{D} \mid \mu)}{P(\mathcal{D})} = \frac{\mathcal{N}(\mu \mid 0, 5) \cdot \prod_{d \in \mathcal{D}} \mathcal{N}(d \mid \mu, \sigma)}{\int \mathcal{N}(\mu \mid 0, 5) \cdot \prod_{d \in \mathcal{D}} \mathcal{N}(d \mid \mu, \sigma) \,\mathrm{d}\mu}
In contrast to the bimodal prior model, with a Gaussian prior and Gaussian likelihood (when inferring the mean with an assumed variance), the posterior is also Gaussian. This is a classic example of conjugate priors where the posterior belongs to the same parametric family as the prior.
The posterior distribution in this case can be derived analytically as:
P(\mu \mid \mathcal{D}) = \mathcal{N}(\mu \mid \mu_n, \sigma_n)
where:
\begin{align*} \mu_n &= \frac{\sigma^2 \mu_0 + n \sigma_0^2 \bar{d}}{\sigma^2 + n \sigma_0^2} \\ \sigma_n^2 &= \frac{\sigma_0^2 \sigma^2}{\sigma^2 + n \sigma_0^2} \end{align*}
Here:
- \mu_0 and \sigma_0^2 are the prior mean and variance (0 and 5^2 in this case)
- \bar{d} is the sample mean of the data (approximately 3.33 in this case)
- n is the number of observations (3 in this case)
- \sigma^2 is the assumed variance of the likelihood (5^2 in this case)
This illustrates an important distinction: while many posterior distributions don’t have a simple parametric form (as in the bimodal prior example), some specific combinations of priors and likelihoods do result in parametric posteriors.
Implementation
import jax
import jax.numpy as jnp
from memo import memo
from jax.scipy.stats.norm import pdf as normpdf
Data = jnp.array([-5, 5, 10])
Mu = jnp.linspace(-50, 50, 200)
@jax.jit
def prior(mu, scale=5):
return normpdf(mu, loc=0, scale=scale)
@jax.jit
def likelihood(mu, sigma=5):
return jnp.prod(normpdf(Data, loc=mu, scale=sigma))
@memo
def model_gaussian_prior[
_mu: Mu,
](sigma=1, prior_sd=5):
observer: knows(_mu)
observer: thinks[
### consider a hypothesis ###
### (hypotheses are normally distributed a priori) ###
process: given(mu in Mu, wpp=prior(mu, prior_sd)), ### given the hypothesis, mu
]
### score the observed data under the likelihood model ###
observer: observes_event(
wpp=likelihood(process.mu, sigma)
)
### return the posterior probability of mu ###
return observer[Pr[process.mu == _mu]]Visualizing the Gaussian Prior Results
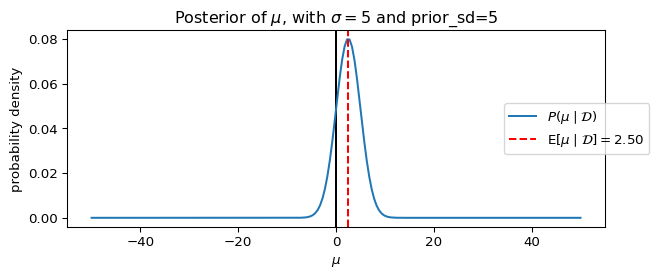
We can visualize the posterior distribution for the Gaussian prior model using the same plotting function defined earlier:
Plotting function
from matplotlib import pyplot as plt
def plot_model_gaussian_prior(sigma=1, prior_sd=5, figsize=(5, 4), verbose=False):
posterior = model_gaussian_prior(sigma=sigma, prior_sd=prior_sd)
fig, ax = plt.subplots(figsize=figsize)
ax.axvline(0, color="black", linestyle="-")
ax.plot(Mu, posterior, label=r"$P(\mu \mid \mathcal{D})$")
mu_expectation = jnp.dot(Mu, posterior)
ax.axvline(
mu_expectation,
color='red',
linestyle='--',
label=r"$\operatorname{E}" + r"[\mu \mid \mathcal{D}]=" + f"{mu_expectation:6.2f}$")
_ = ax.set_title(rf"Posterior of $\mu$, with $\sigma={sigma}$ and prior_sd={prior_sd}")
_ = ax.legend(bbox_to_anchor=(0.8, 0.5), loc='center left')
_ = ax.set_xlabel(r"$\mu$")
_ = ax.set_ylabel("probability density")
plt.tight_layout()
plt.show()Parameters to plot for Gaussian prior
param_list = [
dict(sigma=20, prior_sd=5),
dict(sigma=5, prior_sd=5),
dict(sigma=2, prior_sd=5),
dict(sigma=5, prior_sd=2),
dict(sigma=5, prior_sd=10),
]
for params_ in param_list:
plot_model_gaussian_prior(**params_, figsize=(7, 3))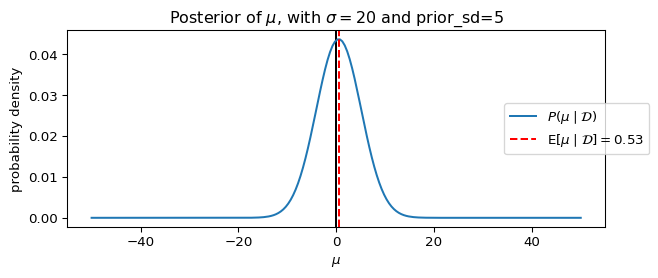
NoteRender env
%reset -f
import sys
import platform
import importlib.metadata
print("Python:", sys.version)
print("Platform:", platform.system(), platform.release())
print("Processor:", platform.processor())
print("Machine:", platform.machine())
print("\nPackages:")
for name, version in sorted(
((dist.metadata["Name"], dist.version) for dist in importlib.metadata.distributions()),
key=lambda x: x[0].lower() # Sort case-insensitively
):
print(f"{name}=={version}")Python: 3.14.2 (main, Dec 5 2025, 21:11:58) [Clang 21.1.4 ]
Platform: Darwin 23.6.0
Processor: arm
Machine: arm64
Packages:
annotated-types==0.7.0
anyio==4.12.0
appnope==0.1.4
argon2-cffi==25.1.0
argon2-cffi-bindings==25.1.0
arrow==1.4.0
astroid==4.0.2
asttokens==3.0.1
async-lru==2.0.5
attrs==25.4.0
babel==2.17.0
beautifulsoup4==4.14.3
bleach==6.3.0
certifi==2025.11.12
cffi==2.0.0
cfgv==3.5.0
charset-normalizer==3.4.4
click==8.3.1
comm==0.2.3
contourpy==1.3.3
cycler==0.12.1
debugpy==1.8.19
decorator==5.2.1
defusedxml==0.7.1
dill==0.4.0
distlib==0.4.0
executing==2.2.1
fastjsonschema==2.21.2
filelock==3.20.1
fonttools==4.61.1
fqdn==1.5.1
h11==0.16.0
httpcore==1.0.9
httpx==0.28.1
identify==2.6.15
idna==3.11
importlib_metadata==8.7.0
ipykernel==7.1.0
ipython==9.8.0
ipython_pygments_lexers==1.1.1
ipywidgets==8.1.8
isoduration==20.11.0
isort==7.0.0
jax==0.8.1
jaxlib==0.8.1
jedi==0.19.2
Jinja2==3.1.6
joblib==1.5.3
json5==0.12.1
jsonpointer==3.0.0
jsonschema==4.25.1
jsonschema-specifications==2025.9.1
jupyter-cache==1.0.1
jupyter-events==0.12.0
jupyter-lsp==2.3.0
jupyter_client==8.7.0
jupyter_core==5.9.1
jupyter_server==2.17.0
jupyter_server_terminals==0.5.3
jupyterlab==4.5.1
jupyterlab_pygments==0.3.0
jupyterlab_server==2.28.0
jupyterlab_widgets==3.0.16
kiwisolver==1.4.9
lark==1.3.1
MarkupSafe==3.0.3
matplotlib==3.10.8
matplotlib-inline==0.2.1
mccabe==0.7.0
memo-lang==1.2.7
mistune==3.1.4
ml_dtypes==0.5.4
nbclient==0.10.2
nbconvert==7.16.6
nbformat==5.10.4
nest-asyncio==1.6.0
networkx==3.6.1
nodeenv==1.9.1
notebook_shim==0.2.4
numpy==2.3.5
numpy-typing-compat==20251206.2.3
opt_einsum==3.4.0
optype==0.15.0
packaging==25.0
pandas==2.3.3
pandas-stubs==2.3.3.251201
pandocfilters==1.5.1
parso==0.8.5
pexpect==4.9.0
pillow==12.0.0
platformdirs==4.5.1
plotly==5.24.1
pre_commit==4.5.1
prometheus_client==0.23.1
prompt_toolkit==3.0.52
psutil==7.1.3
ptyprocess==0.7.0
pure_eval==0.2.3
pycparser==2.23
pydantic==2.12.5
pydantic_core==2.41.5
Pygments==2.19.2
pygraphviz==1.14
pylint==4.0.4
pyparsing==3.2.5
python-dateutil==2.9.0.post0
python-dotenv==1.2.1
python-json-logger==4.0.0
pytz==2025.2
PyYAML==6.0.3
pyzmq==27.1.0
referencing==0.37.0
requests==2.32.5
rfc3339-validator==0.1.4
rfc3986-validator==0.1.1
rfc3987-syntax==1.1.0
rpds-py==0.30.0
ruff==0.14.9
scikit-learn==1.8.0
scipy==1.16.3
scipy-stubs==1.16.3.3
seaborn==0.13.2
Send2Trash==1.8.3
setuptools==80.9.0
six==1.17.0
soupsieve==2.8
SQLAlchemy==2.0.45
stack-data==0.6.3
tabulate==0.9.0
tenacity==9.1.2
terminado==0.18.1
threadpoolctl==3.6.0
tinycss2==1.4.0
toml==0.10.2
tomlkit==0.13.3
tornado==6.5.4
tqdm==4.67.1
traitlets==5.14.3
types-pytz==2025.2.0.20251108
typing-inspection==0.4.2
typing_extensions==4.15.0
tzdata==2025.3
uri-template==1.3.0
urllib3==2.6.2
virtualenv==20.35.4
wcwidth==0.2.14
webcolors==25.10.0
webencodings==0.5.1
websocket-client==1.9.0
widgetsnbextension==4.0.15
xarray==2025.12.0
zipp==3.23.0